Recent Side Projects
Using Extended Kalman Filter For Robot Localization
Collaborative Task Planning using DRL for mid-air robot-robot object handover
Graduate Projects
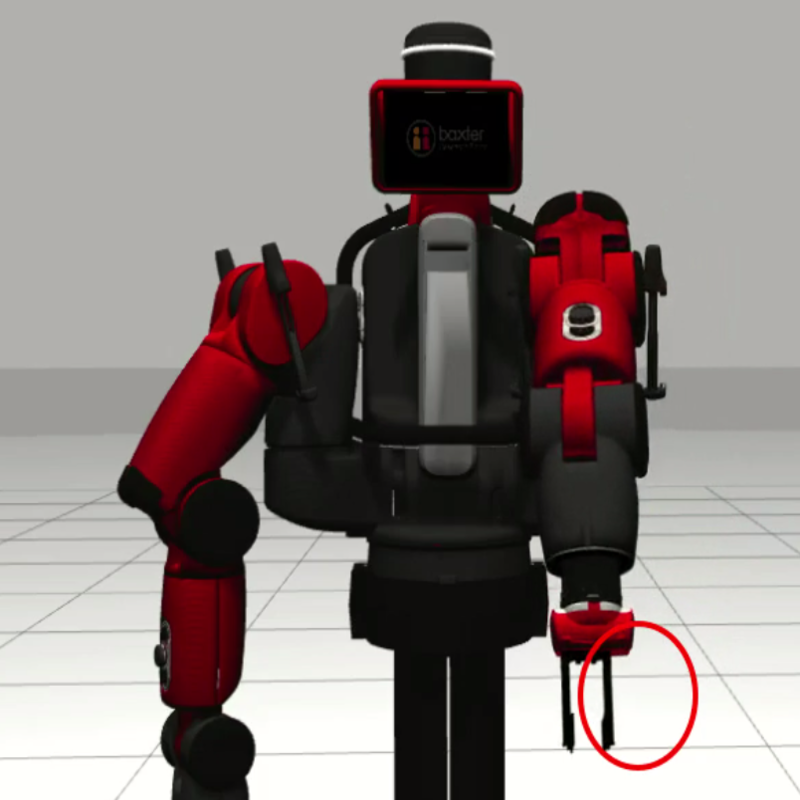
Baxter Kinematics & Dynamics Library
Kinematics and Dynamics Library for the Baxter robot written in Python

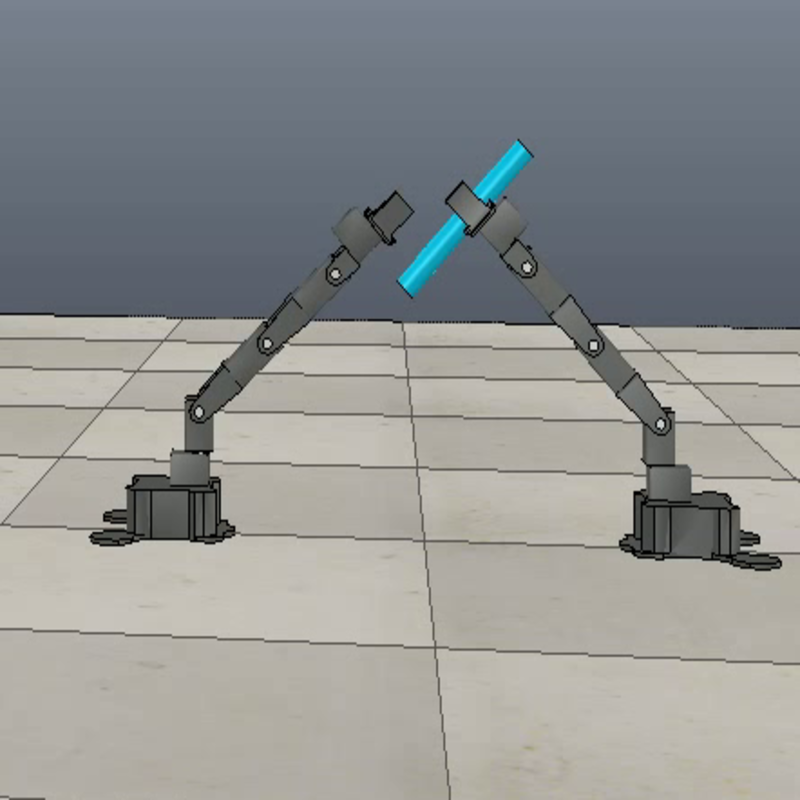
Motion Planning for Dual-Arm Manipulator
Motion Planning of a 15-DOF dual arm robot for task automation
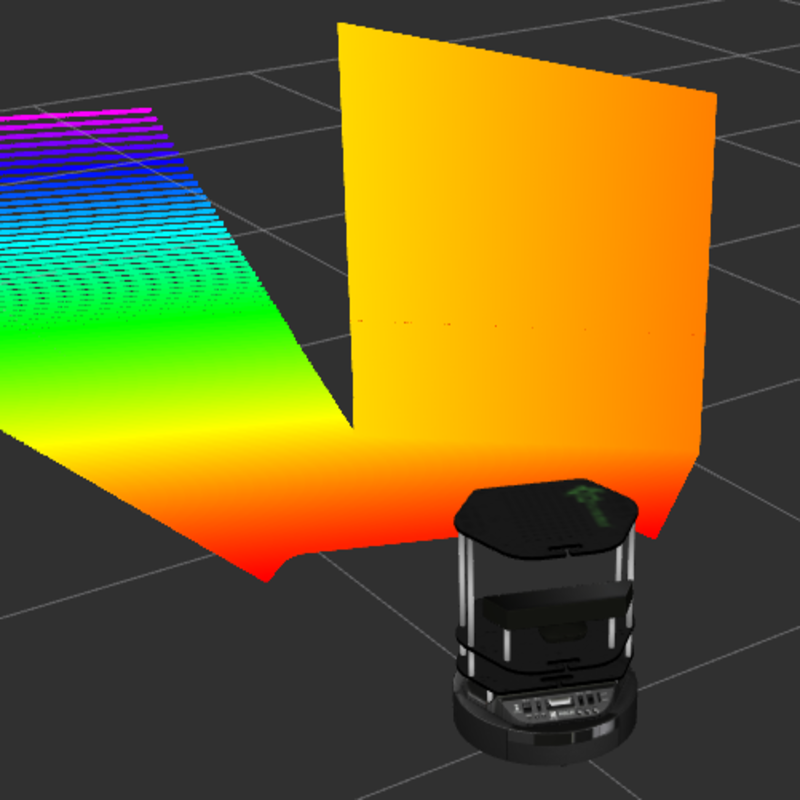
Fuzzy Logic Controller For Robot Navigation
Using a Fuzzy Logic Controller for autonomous navigation of a Turtlebot robot
Robot-Robot Object Handover Using Reinforcement Learning
Collaborative Task Planning using DRL for mid-air robot-robot object handover
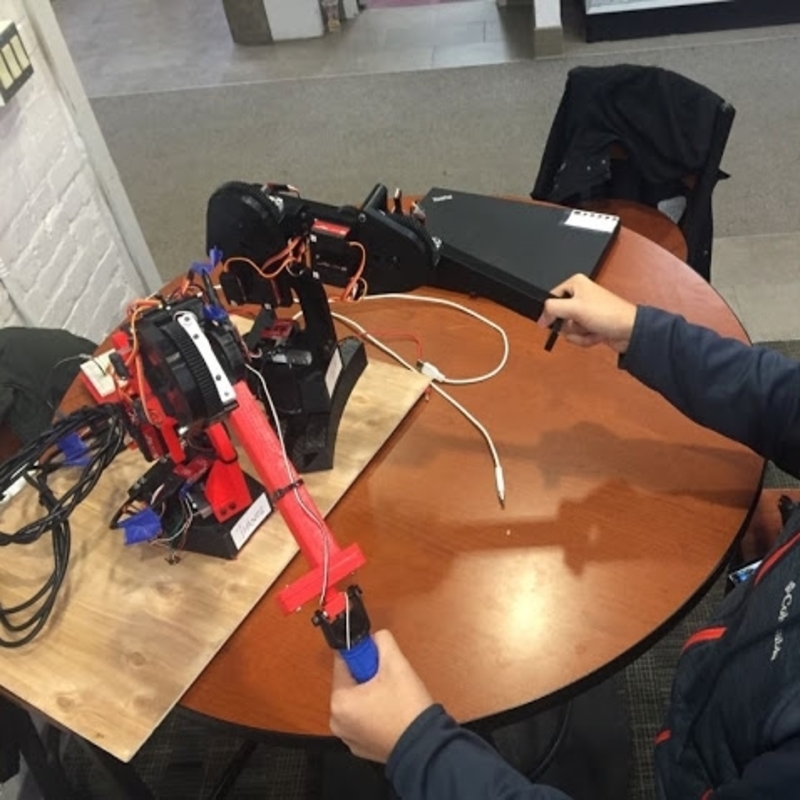
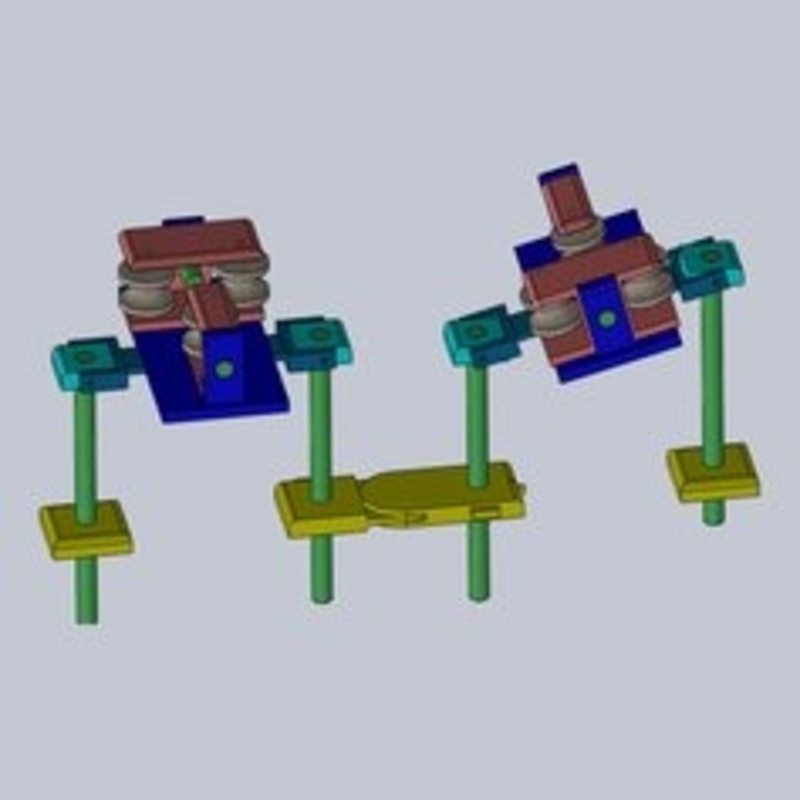
Haptic Rehabilitation Device Using Arm Stroke Rehabilitation
Development of two 3-DOF manipulator arms for stroke rehabilitation

Learning From Demonstration Using DMPs
Dynamic Movement Primitives based trajectory generation for Kuka YouBot
Visual Odometry Estimation Using Deep Learning
Determination of mobile robot odometry for localization using visual feed only
Undergraduate Projects

Surface Electromyography Signal Extraction
Design and development of a robust SEMG signal extraction setup
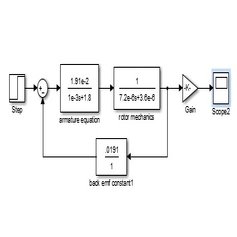
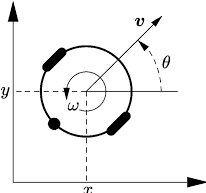
Control System Design for Unmanned Ground Vehicle
Control System design for a differential drive UGV for given path motion using MATLAB

Geofencing-based Rail Crossing Alert System
Using a Fuzzy Logic Controller for autonomous navigation of a Turtlebot robot

Human Motion Mimicking Robot Arm
Collaborative Task Planning using DRL for mid-air robot-robot object handover
Robotic System For Electric Line Maintenance
Design of a robotic system for maintenance and repair of live power transmission lines
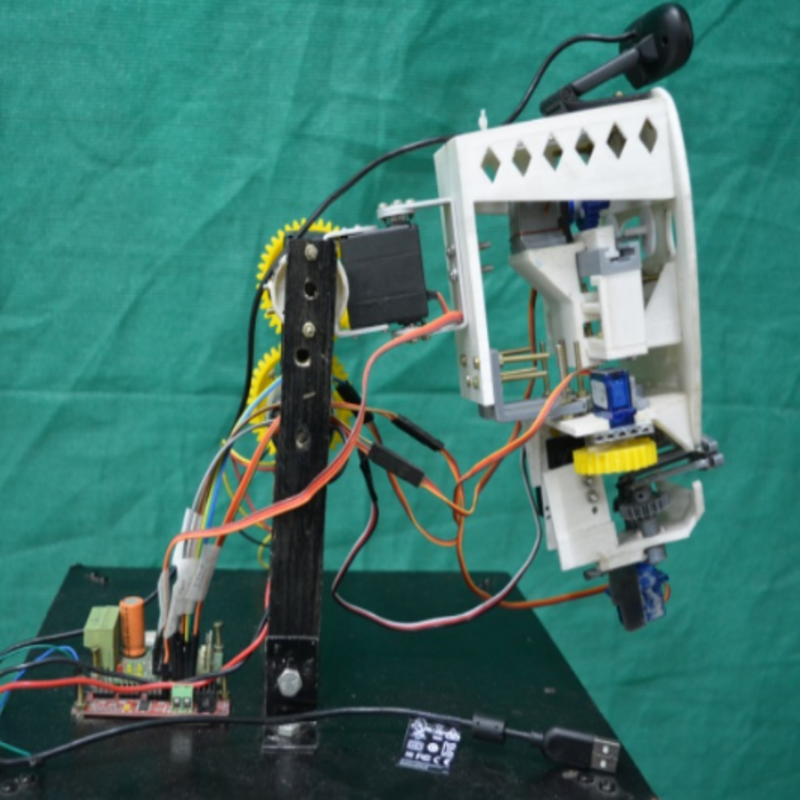
Actroid - Smart Animatronic Humanoid Face
Smart Animatronic Human Face with natural interaction capability
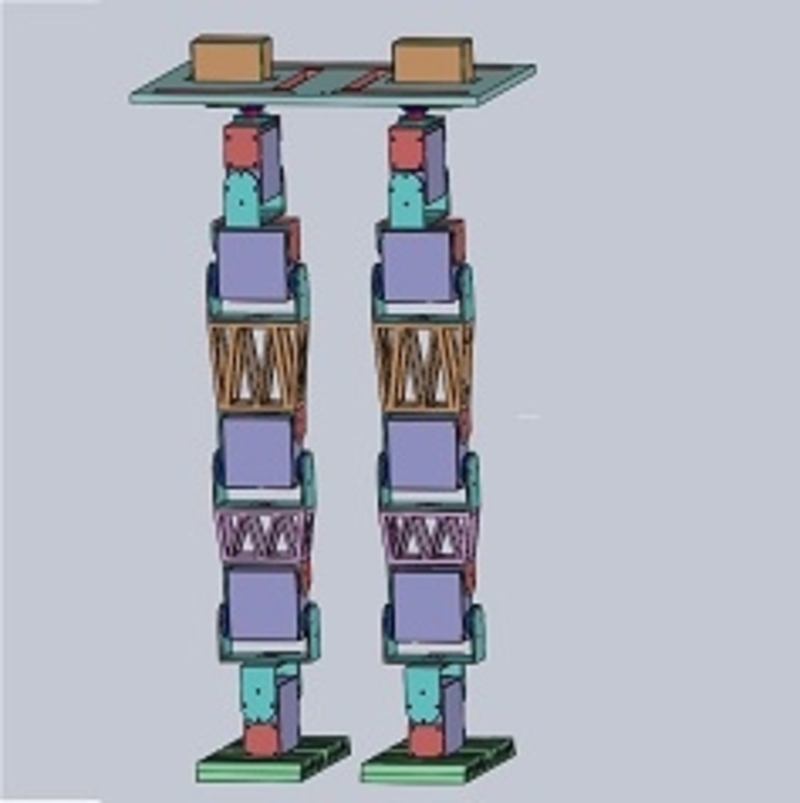
Lower Body Flat-Foot Walking Biped Robot
Design and development of a lower body walking biped robot