Description
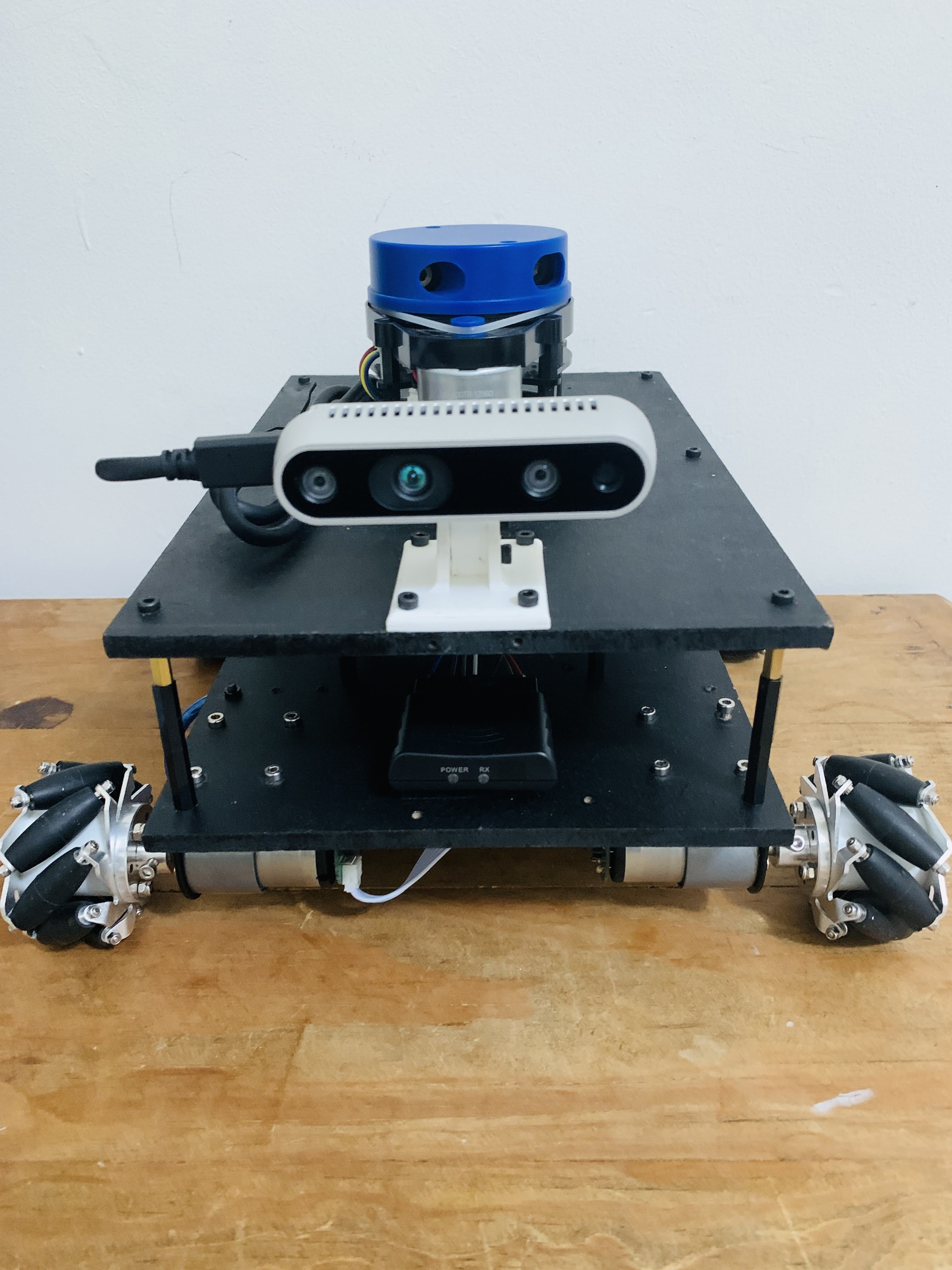
Indoor robot equipped with Intel Realsense depth camera, 3D lidar, IMU and wheel encoders powered by Jetson Nano compute platform. It uses Gazebo and ROS2 for simulation.
Indoor robot equipped with Intel Realsense depth camera, 3D lidar, IMU and wheel encoders powered by Jetson Nano compute platform. It uses Gazebo and ROS2 for simulation.