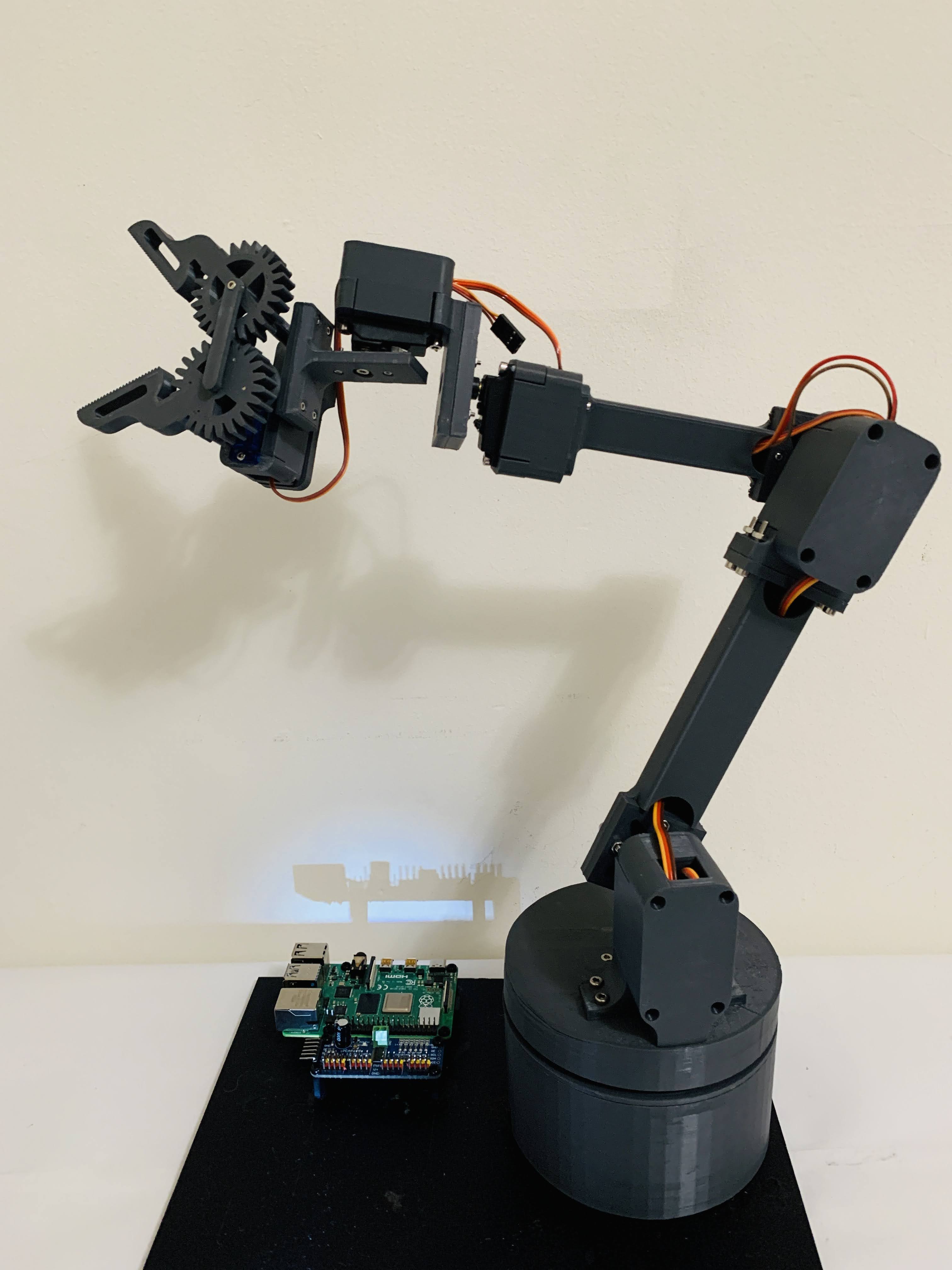
Description A small desktop robot manipulator with 6 degrees of freedom controllable via ROS and simulated in Gazebo and Rviz. Updates